�� ��
������
����
�۸�Ϊ�̼��ṩ�IJο��ۣ���ͨ��"��ȡ��ͱ���"
������������������λ~
����
| Ʒ�ƣ�SynTouch | �ͺţ�BioTac | ѹ�����ͣ����� |
| ����ѹ����0-50N | ������ͣ�ģ�� | �����ѹ��0-10v |
| ���ȣ�10% | ��Դ��ѹ��24V | �����¶ȣ�25�� |
| ���ԣ�ѹ�����¶� | ��С��װ����1 | Ӧ������������ |
BioTac��ָ�ʹ���������
SynTouch***ģ����ָ����������Ժо������ļ������ṩ�Ĵ����������뼸���ֳɵĺͶ��ƵĻ�����ץ���ݣ��������о�����ҵӦ�á�
������������������ѽ�����Ʒ�Ƶ�δ�������Ա�Ϊ��ʵ����Ӧ�÷�Χ�ӻ����˼������µ�����Ʒ��װ���ԡ�
BioTac��һ����ָ�ʹ�������������������˵���ָ���Ը������ĸ���Ƥ������-ѹ�����������¶ȸ��������ṩ���˵�ָ����ӽ���˳Ӧ�ԡ�
BioTac����������һ��������Ԫ����������Ԫ��������������������С�������¶��������������͵ĸ���ģʽΪ���ģ�
����Χ��������������Ƥ��������Һ�塣
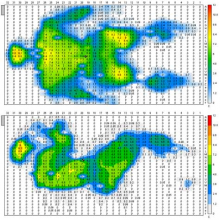
������ָʩ���ⲿѹ��ʱ������Ƥ�������λ�����ڲ�Һ��ֲ����ڲ�Һ��ֲ���ͨ�������ں�����Ԫ�����ϵĶ���������Ϊ�迹λ�ơ���ʹ�����������й���ǿ�ȣ����Ӵ����������״����Ϣ�����ң���������ı���ʱ���ɻ���Ħ�������������Һ�������������ɸ�������ѹ��������ͨ������·��������������⣬��BioTac����������������������¶��ݶȣ�������������ϵ���IJ��죬��������Ὣ�����Ϊ�¶�������
����
����Bio Tac Cheetah C��[ Windows / OS X / Linux]
��? LabView����������[Winodws]
��? 3 Bio Tac GUIͼ����������[Winodws]
��? ROS�������˲���ϵͳ��-������Shadow Hand [Linux]
��PC���ӹ��߰��Ľӿ�
��-Cheetah SPI- USBת��������
��-Multi-BioTac��-
���������
��������ͨѶ����
��-�����¶ȷ�Χ��0��C��60��C-
��ͨ��Э����CAN��EtherCAT��
��SPI-�����ӿڣ�CAN��USB
������
��?����Ƥ�����������壨����2g��
��?������Ԫ������������Vectra������7g��
��������Һ��PEG-200 [ˮ/�廯��]������0.3-0.5g��
��������ָ�ף����ϣ������� 0.5g��


�Ͼ���Խ���ܿƼ�����˾ �ֻ���𐀑𐀒𐀓𐀑𐀔𐀓𐀕𐀒𐀔𐀒𐀖 ��ַ������ �Ͼ� �ػ��� �ػ�����ɽ��